編輯:admin 浏覽量:81 發布日期: 2019-02-13 10:50
迄今爲止,在工業生産中使用(yòng)機器人(rén)手僅限于堅固的(de)雙指和(hé)三指夾持器。它們被用(yòng)于執行相對(duì)簡單的(de)動作。由于缺乏可(kě)用(yòng)的(de)技術能力,用(yòng)于更精細任務的(de)機器人(rén)手已被證明(míng)是不成功的(de)。微電子學與微觀力學的(de)積極互動現在已經産生了(le)備受追捧的(de)突破。實際上,該領域的(de)技術進步正在不斷增長(cháng)。因此,具有可(kě)單獨控制的(de)手指和(hé)基于人(rén)手的(de)關節的(de)機器人(rén)手不再是虛構的(de),并且可(kě)能很快(kuài)在工業部門中日常可(kě)用(yòng)。
人(rén)手是自然界中最普遍的(de)工具之一。難怪研究人(rén)員(yuán)渴望将這(zhè)種進化(huà)設計的(de)優勢應用(yòng)到新一代機器人(rén)手中。
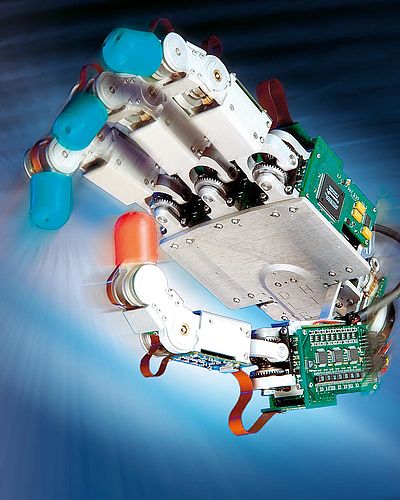
德國航空航天中心(DLR)與哈爾濱工業大(dà)學(HIT)合作,借助微型執行器和(hé)高(gāo)性能總線技術,已開發出類似人(rén)手的(de)機器人(rén)手。
構造具有人(rén)手的(de)能力和(hé)靈活性的(de)機器人(rén)手需要至少四個(gè)手指:三個(gè)手指以允許機器人(rén)手抓住錐形部分(fēn),并且拇指用(yòng)作支撐。因此,新的(de)機器人(rén)手由三個(gè)手指組成,每個(gè)手指具有三個(gè)自由度的(de)四個(gè)關節。第四個(gè)手指設計爲拇指,具有四個(gè)自由度。不言而喻,必須以實際方式控制和(hé)監控通(tōng)過該解決方案實現的(de)各種運動。在此背景下(xià),高(gāo)性能信息通(tōng)道是控制系統的(de)基本功能,特别是在執行複雜(zá)任務時(shí)。因此,沿著(zhe)大(dà)批量處理(lǐ),時(shí)間是至關重要的(de)。
用(yòng)于“神經”的(de)總線技術
在過去,使用(yòng)拉線移動機器人(rén)手指。相比之下(xià),現代微工程允許電機直接安裝在手指中。在這(zhè)種情況下(xià),爲控制處理(lǐ)器提供必要的(de)位置和(hé)操作數據。這(zhè)是整體操作中不可(kě)或缺的(de)一部分(fēn) - 也(yě)是允許執行器充分(fēn)發揮其優勢的(de)唯一方法。每個(gè)手指關節都配有公司設計的(de)非接觸式角度傳感器以及扭矩傳感器。由于兩個(gè)傳感器都需要極高(gāo)的(de)分(fēn)辨率,因此總線用(yòng)于傳輸所需的(de)大(dà)量數據。用(yòng)于比較設定值和(hé)實際值的(de)快(kuài)速反饋對(duì)于基于FPGA(現場(chǎng)可(kě)編程門陣列)至關重要。從手到控制處理(lǐ)器的(de)外部串行連接隻需要三根引線。
實際控制系統是插入式PCI卡上的(de)信号處理(lǐ)器,集成在标準PC中。操作員(yuán)友好的(de)界面允許從計算(suàn)機控制“手”。所有傳感器數據都可(kě)以顯示在監視器上。從一開始就設計了(le)數據顯示,控制和(hé)手與計算(suàn)機的(de)連接,以便将來(lái)在工業環境中使用(yòng)。除了(le)“神經”和(hé)“大(dà)腦(nǎo)”之外,功能正常的(de)手還(hái)需要“肌肉”來(lái)賦予它力量。
微型執行器取代肌肉力量
新機器人(rén)手的(de)巨大(dà)複雜(zá)性有其代價。每個(gè)手指需要幾個(gè)可(kě)單獨控制的(de)緻動器。在這(zhè)種特殊情況下(xià),每手有12個(gè)電子換向直流電動機(EC電動機),包括模拟霍爾傳感器。工程師團隊選擇由微型電機專家FAULHABER開發的(de)執行器,因爲它們涵蓋了(le)所需的(de)全部規格。它們是低成本,商用(yòng),性能豐富的(de)産品,占地面積極小。四指機器人(rén)手選用(yòng)了(le)直徑爲16 mm的(de)無刷直流伺服電機。它們可(kě)以與相同直徑的(de)齒輪系統連接,形成一個(gè)集成單元。這(zhè)些電機有12 V版本和(hé)24 V版本,輸出功率爲11 W,最大(dà)連續扭矩高(gāo)達2.6 mNm。即使在旋轉方向發生變化(huà)時(shí),良好的(de)動态響應和(hé)預應力球軸承也(yě)能确保控制命令的(de)精确響應行爲。标配的(de)模拟霍爾傳感器标志著(zhe)控制器的(de)準确位置,并提供至少8位分(fēn)辨率的(de)必要反饋信息。霍爾傳感器和(hé)電機形成一個(gè)緊湊的(de)單元,長(cháng)度僅爲28毫米,外徑爲16毫米 - 重量僅爲31克。電機空轉29,900轉。執行器與全金屬行星齒輪箱結合使用(yòng)。這(zhè)些标準的(de)FAULHABER産品降低了(le)用(yòng)于“手”的(de)高(gāo)轉速,同時(shí)增強了(le)扭矩。有多(duō)種選擇,比率從3.7:1到5647:1。本申請中使用(yòng)的(de)比例爲159:1。允許的(de)扭矩因此增加到450mNm的(de)最大(dà)值。齒輪箱本身重量僅爲33克,總長(cháng)度爲29.4毫米。由于采用(yòng)緊湊的(de)執行器技術,通(tōng)過總線反饋和(hé)快(kuài)速數據轉發,新型HIT-DLR機器人(rén)手可(kě)以非常精細和(hé)精确地控制。通(tōng)過這(zhè)種方式,微工程和(hé)微電子技術完美(měi)地相互補充。“武裝”具有标準組件和(hé)良好的(de)概念,工程師現在可(kě)以制造幾年前難以想象的(de)産品,即使是最昂貴的(de)定制組件。微工程和(hé)微電子技術相輔相成。“武裝”具有标準組件和(hé)良好的(de)概念,工程師現在可(kě)以制造幾年前難以想象的(de)産品,即使是最昂貴的(de)定制組件。微工程和(hé)微電子技術相輔相成。“武裝”具有标準組件和(hé)良好的(de)概念,工程師現在可(kě)以制造幾年前難以想象的(de)産品,即使是最昂貴的(de)定制組件。