編輯:admin 浏覽量:75 發布日期: 2019-02-13 10:49
自遠(yuǎn)古以來(lái),人(rén)們一直夢想著(zhe)創造人(rén)造人(rén)類。如今,現代技術能夠以人(rén)形機器人(rén)的(de)形式實現這(zhè)一夢想。即使仍有大(dà)量的(de)開發工作需要,每個(gè)項目都必須采取這(zhè)些初步措施。作爲此過程的(de)初始階段,自動工作的(de)人(rén)形服務機器人(rén)已經提供了(le)廣泛的(de)益處。除了(le)所使用(yòng)的(de)許多(duō)部件的(de)相互作用(yòng)之外,主要的(de)挑戰是電源和(hé)各部件所需的(de)空間。Microdrives是解決這(zhè)兩個(gè)關鍵問題的(de)理(lǐ)想解決方案。它們相當大(dà)的(de)功率密度,高(gāo)效率和(hé)最小的(de)空間要求,
機器人(rén)應該越像人(rén)類,機電工程輸入就越複雜(zá)。特别是在需要“人(rén)類社會行爲”的(de)部門,例如服務功能或在博物(wù)館,機場(chǎng)或醫院等場(chǎng)所提供信息時(shí),機器人(rén)建設的(de)複雜(zá)技術是必須的(de)。多(duō)年來(lái),總部位于巴塞羅那的(de)Pal Robotics SL公司一直緻力于爲特殊應用(yòng)構建人(rén)形機器人(rén)。非語言交流,即肢體語言,在增加人(rén)形機器人(rén)的(de)接受度方面也(yě)起著(zhe)重要作用(yòng)。爲了(le)在預定義的(de)機器人(rén)體中容納盡可(kě)能多(duō)的(de)功能,機器人(rén)專家一直在與位于Schönaich的(de)微驅動器專家FAULHABER合作。
用(yòng)于實際應用(yòng)的(de)服務機器人(rén)。
旨在執行日常功能的(de)人(rén)形機器人(rén)必須滿足某些條件。開發人(rén)員(yuán)希望将信息輸出,次要運輸任務和(hé)服務功能等功能集成到新的(de)REEM機器人(rén)中。這(zhè)導緻機器人(rén)高(gāo)度爲1.65米,因此它可(kě)以在視線水(shuǐ)平與人(rén)類進行通(tōng)信。同樣重要的(de)是機器人(rén)不應該過重,盡管需要較低的(de)重心和(hé)空間來(lái)容納必要的(de)電池。目前的(de)機器人(rén)型号重約90公斤,足以容納一組電池,可(kě)實現8小時(shí)的(de)自主操作。除了(le)空載重量外,該服務機器人(rén)還(hái)可(kě)在其下(xià)部裝載平台上承載高(gāo)達30 kg的(de)有效負載。每隻手臂可(kě)以獨立移動3公斤。在這(zhè)種情況下(xià),位于機器人(rén)底座的(de)輪子确保了(le)有效的(de)運動。一方面,這(zhè)确保了(le)最小的(de)功耗和(hé)安靜的(de)運行,而另一方面,該設計爲計劃的(de)應用(yòng)提供了(le)足夠的(de)移動性,最高(gāo)可(kě)達4 km / h。
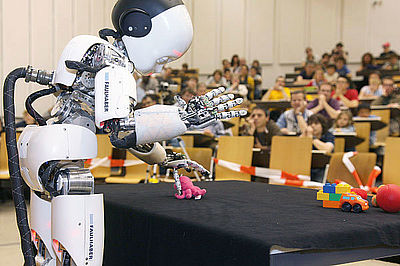
除了(le)用(yòng)于各種可(kě)編程應用(yòng)的(de)觸摸屏外,REEM還(hái)配備了(le)麥克風,立體相機,激光(guāng)和(hé)超聲波傳感器,加速度計和(hé)陀螺儀。這(zhè)些設備使機器人(rén)能夠識别其在房(fáng)間中的(de)當前位置,在其工作區(qū)域内自主移動并避免突然的(de)障礙物(wù)或人(rén)們穿過其路徑。
機器人(rén)頸部和(hé)腰部的(de)兩個(gè)DC微驅動器提供必要的(de)表現力。由于其緊湊的(de)尺寸,即使在這(zhè)兩個(gè)“收縮”區(qū)域中也(yě)可(kě)以輕松使用(yòng)驅動器。小型緻動器可(kě)以彼此獨立地移動頭部和(hé)軀幹,并允許它們呈現不同的(de)姿勢。這(zhè)使得(de)機器人(rén)能夠使用(yòng)适合于各自情況的(de)肢體語言來(lái)模仿人(rén)類特征。
Microdrives提供靈活性。
Microdrives不隻是複制更大(dà)的(de)電機。由于所涉及的(de)物(wù)理(lǐ)特性,它們通(tōng)常提供比僅僅減小尺寸所預期的(de)更好的(de)動态,更高(gāo)的(de)輸出或更高(gāo)的(de)效率。實際上,這(zhè)意味著(zhe)可(kě)以在不影(yǐng)響使用(yòng)壽命的(de)情況下(xià)實現非常高(gāo)的(de)短期過載能力。當涉及執行模仿特定手勢所必需的(de)較不頻(pín)繁但臨時(shí)的(de)動作時(shí),這(zhè)證明(míng)是特别有利的(de)。除了(le)所有微電機的(de)典型特征外,各種型号還(hái)具有進一步的(de)優勢,具體取決于手頭的(de)應用(yòng)。由于每個(gè)控制脈沖定義了(le)一個(gè)步長(cháng),步進電機無需額外的(de)編碼器即可(kě)提供精确定位。無刷驅動器即使在最低電源電壓下(xià)也(yě)能運行,因此非常适合自動化(huà),電池供電系統,設計在電壓下(xià)降時(shí)不會立即失效。電子換向直流電機是長(cháng)使用(yòng)壽命和(hé)最大(dà)動态性能的(de)最佳選擇。智能運動控制器可(kě)以在四象限操作中控制驅動器,并減少機器人(rén)控制器的(de)負載。通(tōng)過不同的(de)齒輪電機組合,所有微型設備都可(kě)以設置爲特定應用(yòng)的(de)速度或所需的(de)輸出扭矩。微電機已經長(cháng)期用(yòng)于“機器人(rén)”輔助設備(例如電動手動和(hé)腿部假肢)的(de)事實表明(míng)它們不僅滿足人(rén)類機器人(rén)的(de)最嚴格要求。智能運動控制器可(kě)以在四象限操作中控制驅動器,并減少機器人(rén)控制器的(de)負載。通(tōng)過不同的(de)齒輪電機組合,所有微型設備都可(kě)以設置爲特定應用(yòng)的(de)速度或所需的(de)輸出扭矩。微電機已經長(cháng)期用(yòng)于“機器人(rén)”輔助設備(例如電動手動和(hé)腿部假肢)的(de)事實表明(míng)它們不僅滿足人(rén)類機器人(rén)的(de)最嚴格要求。智能運動控制器可(kě)以在四象限操作中控制驅動器,并減少機器人(rén)控制器的(de)負載。通(tōng)過不同的(de)齒輪電機組合,所有微型設備都可(kě)以設置爲特定應用(yòng)的(de)速度或所需的(de)輸出扭矩。微電機已經長(cháng)期用(yòng)于“機器人(rén)”輔助設備(例如電動手動和(hé)腿部假肢)的(de)事實表明(míng)它們不僅滿足人(rén)類機器人(rén)的(de)最嚴格要求。
現代微驅動器的(de)應用(yòng)範圍非常廣泛,可(kě)根據應用(yòng)提供多(duō)種設計。但是,這(zhè)本身并不能保證在所有情況下(xià)都能普遍使用(yòng)。這(zhè)就是系統概念發揮作用(yòng)的(de)地方。它是廣泛的(de)配件系列,從運動控制器,編碼器,總線連接,各種齒輪頭等控制模塊,最終适應的(de)靈活控制電子設備,使微驅動器成爲機器人(rén)制造中理(lǐ)想的(de)機械“肌肉”。