

編輯:admin 浏覽量:82 發布日期: 2019-02-13 10:47
在緊湊型高(gāo)扭矩伺服電機的(de)幫助下(xià),微型無人(rén)駕駛地面車輛可(kě)在最惡劣的(de)環境中可(kě)靠地進行偵察。
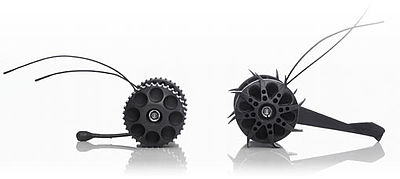
如果任務是從一堆瓦礫中救出災難受害者,即使最複雜(zá)的(de)機器人(rén)也(yě)不可(kě)能比一個(gè)人(rén)做(zuò)更有效的(de)工作。例如ReconRobotics公司(美(měi)國明(míng)尼蘇達州Edina)的(de)Recon Scout IR的(de)UGV(無人(rén)駕駛地面車輛)可(kě)以與人(rén)類相比,探索沒有危險的(de)倒塌建築并從那裏發送實時(shí)圖片,這(zhè)可(kě)以在戰術響應方面,它是應急工作者的(de)重要決策工具。Scout,像小啞鈴一樣向所有人(rén)看,可(kě)以在傳輸連續的(de)圖片流時(shí)按照(zhào)指示爬上崎岖的(de)地形或沿著(zhe)指定的(de)路徑導航,所有這(zhè)些都在沒有電纜連接的(de)情況下(xià)進行操作。使用(yòng)FAULHABER的(de)精密設計,堅固的(de)材料和(hé)緊湊的(de)高(gāo)扭矩伺服電機來(lái)構建設備,
微小但強大(dà)
UGV可(kě)能很小,但設計它是一個(gè)很高(gāo)的(de)訂單。工程團隊在每一個(gè)轉折點都面臨著(zhe)相互矛盾的(de)性能要求:該單元必須功能強大(dà),但體積小,扭矩大(dà),但一次充電時(shí)壽命長(cháng)。這(zhè)需要妥協,優化(huà)組件和(hé)設置規範的(de)優先級。然而,由這(zhè)個(gè)過程産生的(de)機器人(rén)幾乎完全掌握了(le)它的(de)所有任務。
主要要求是足夠的(de)動力 - 如果無法到達目标區(qū)域,搜索和(hé)救援UGV并不是很好。在碎石或不平坦的(de)地面上行駛需要相當大(dà)的(de)扭矩。通(tōng)常情況下(xià),工程師隻會選擇足夠大(dà)的(de)電機來(lái)提供所需的(de)功率,但Scout的(de)緊湊外形會帶來(lái)局限性。第二個(gè)顯而易見的(de)方法是,增加一個(gè)高(gāo)減速比的(de)齒輪箱來(lái)将電機速度轉換爲扭矩不是一種選擇 - 它不僅會增加驅動器的(de)尺寸超出可(kě)用(yòng)空間,而且隻會增加扭矩,但會降低速度這(zhè)在搜索和(hé)救援機器人(rén)中是不可(kě)接受的(de)。
該項目需要具有高(gāo)功率密度和(hé)香煙(yān)直徑的(de)電動機。該解決方案來(lái)自FAULHABER在美(měi)國的(de)姊妹公司MICROMO,配備8和(hé)10毫米直流電機。Recon Robotics首席運營官Patrick McKinney說:“FAULHABER擁有我們所尋求的(de)尺寸範圍内最好的(de)解決方案。” 這(zhè)些電機更常用(yòng)于醫療應用(yòng),這(zhè)帶來(lái)了(le)可(kě)靠解決方案的(de)額外好處。“他(tā)們必須在生活依賴于他(tā)們的(de)功能的(de)環境中運作”,他(tā)補充說。“我們已經讓這(zhè)些電機在50%的(de)負載下(xià)連續運行168小時(shí)以上。它們令人(rén)印象深刻。“額外的(de)行星齒輪箱提供64:1的(de)減速比,以便在适度的(de)尺寸增加時(shí)進一步提高(gāo)扭矩。
UGV橫梁包含紅外敏感攝像機,紅外照(zhào)明(míng),以及電機和(hé)驅動單元,控制器和(hé)用(yòng)于無線電傳輸所有數據的(de)收發器。Recon Scout的(de)兩個(gè)輪子彼此獨立驅動。爲此,具有閉環調節器電路的(de)控制系統提供相應處理(lǐ)的(de)控制信号。陀螺儀提供z軸反饋(偏航軸)并确保車輪均勻驅動,Scout可(kě)沿直線移動。爲了(le)使UGV能夠在所需的(de)路徑上轉向,加速度計可(kě)以監控x軸和(hé)z軸的(de)運動。加重的(de)穩定尾部保持橫梁的(de)旋轉位置穩定,使得(de)相機鏡頭保持正确對(duì)準以用(yòng)于圖像采集。
艱難的(de)東西
忘記開車到感興趣的(de)地區(qū); Recon Scout IR設計用(yòng)于直接投射或投射到監視位置。因此,ReconRobotics團隊必須設計該裝置,以承受30立方英尺的(de)混凝土沖擊。他(tā)們從飛(fēi)機級鋁制底盤開始,這(zhè)也(yě)有助于散熱(rè)。橫梁上的(de)钛制外殼可(kě)保護内容物(wù)。輪子由專有的(de)聚乙烯制成,也(yě)可(kě)用(yòng)作沖擊吸收器。
當設備在投擲後著(zhe)陸時(shí),車輪以足夠的(de)力量撞擊地面以潛在地剝離齒輪。爲了(le)防止這(zhè)種可(kě)能性,該團隊設計了(le)一種專利的(de)機械離合器,在Scout降落後,在碰撞和(hé)重新接合時(shí)脫離齒輪。由于FAULHABER電機的(de)高(gāo)效運行,由于成像儀,照(zhào)明(míng)器和(hé)車輪不斷運轉,Scout的(de)充電運行時(shí)間爲1小時(shí)。
Scout的(de)原始版本是一種監視機器人(rén),專爲軍事應用(yòng)和(hé)相對(duì)清潔的(de)城(chéng)市環境中的(de)特殊任務而設計。當ReconRobotics集團開始開發搜索和(hé)救援版本時(shí),他(tā)們面臨著(zhe)在瓦礫,污垢和(hé)熱(rè)量中運行的(de)新要求。客戶指定4-in-tall Scout能夠獨立地将其自身提升到2-in-high對(duì)象上。滿足這(zhè)個(gè)規格對(duì)于這(zhè)麽小的(de)機器來(lái)說是一個(gè)挑戰,特别是因爲其他(tā)要求仍然像以前一樣嚴格。通(tōng)過使用(yòng)直徑10毫米的(de)更強大(dà)的(de)電機,車輪稍微加寬,以及可(kě)靠的(de)英寸長(cháng)釘的(de)安裝來(lái)改善牽引力,解決了(le)這(zhè)個(gè)問題。


